

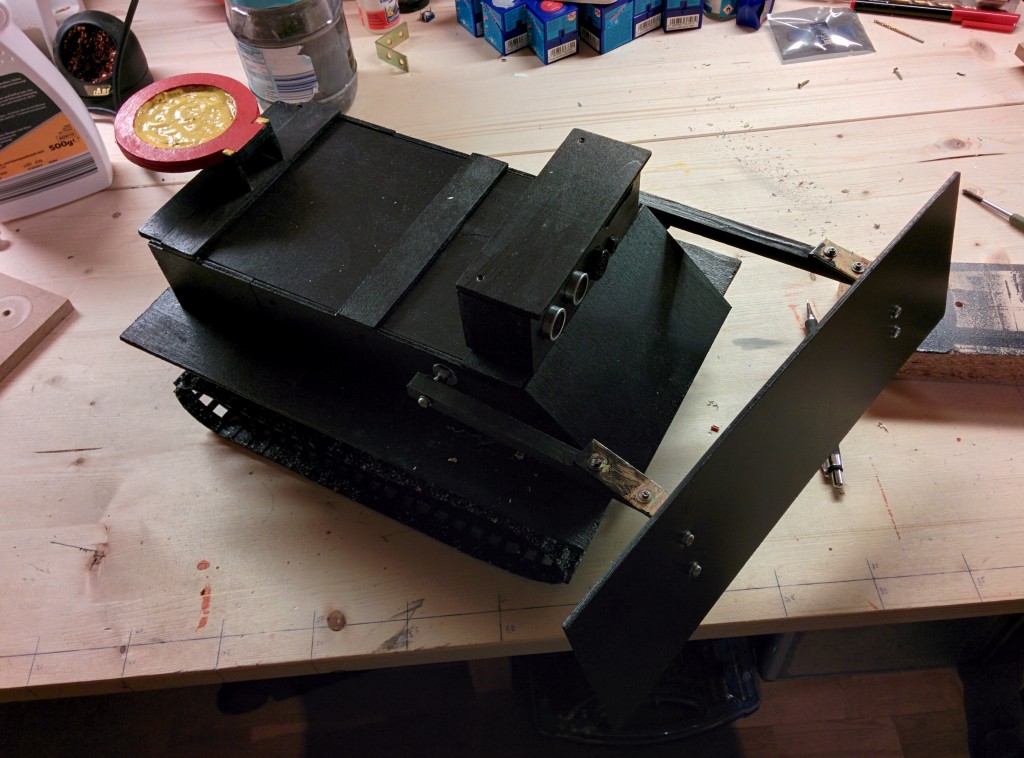
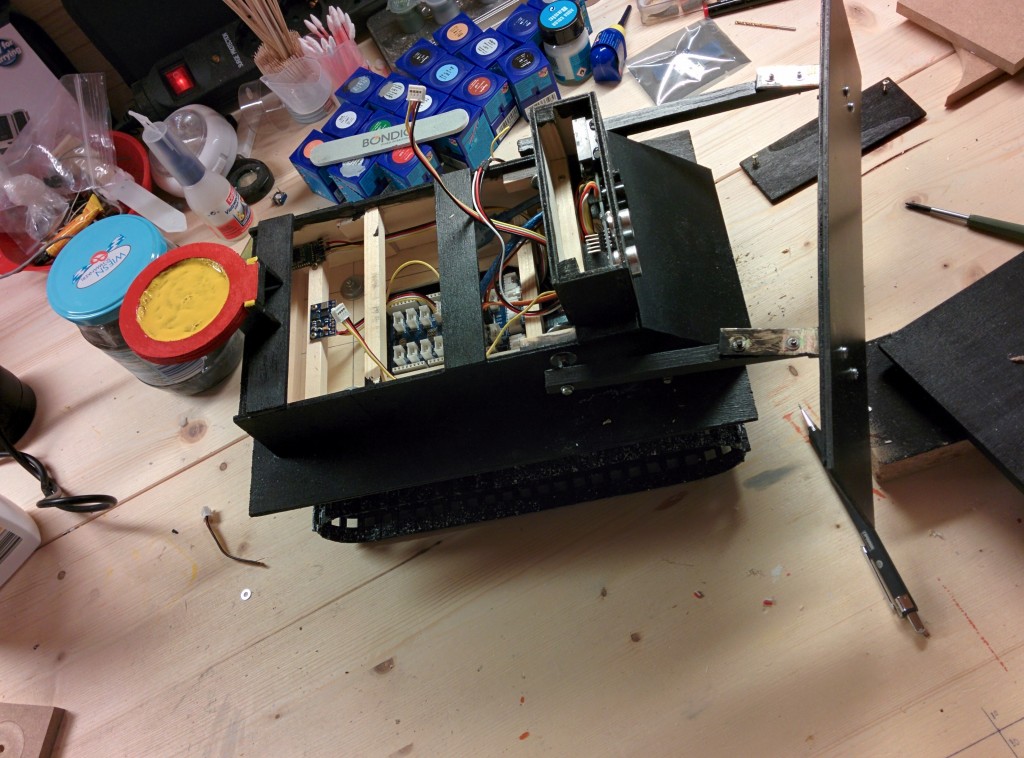
Wieder einer meiner unzähligen Anläufe einen kleinen mobilen Roboter zu bauen. Nachdem es ein paar Tage zuvor geschneit hatte versuchte ich einen kleinen Schneeräumer zu bauen.
Das Fahrwerk hatte ich schon lange zu Hause rumliegen und schon für viele andere Anläufe verwendet. Es war ursprünglich Teil eines ferngesteuerten Pistenbullys.
Das Hirn in dem Gefährt bestand aus einem Arduino Mega. Als Schnittstelle nach außen, hatte ich ursprünglich ein Bluetooth-Modul verbaut, welches ich jedoch später durch ein Wifi-Modul ersetzt habe.




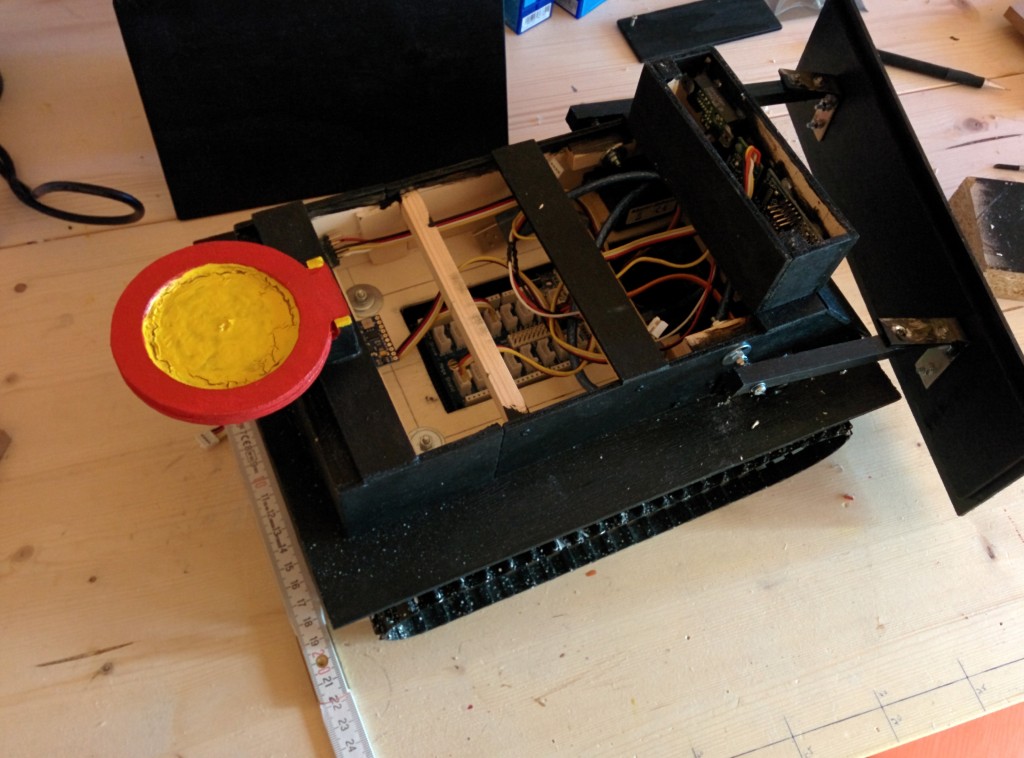
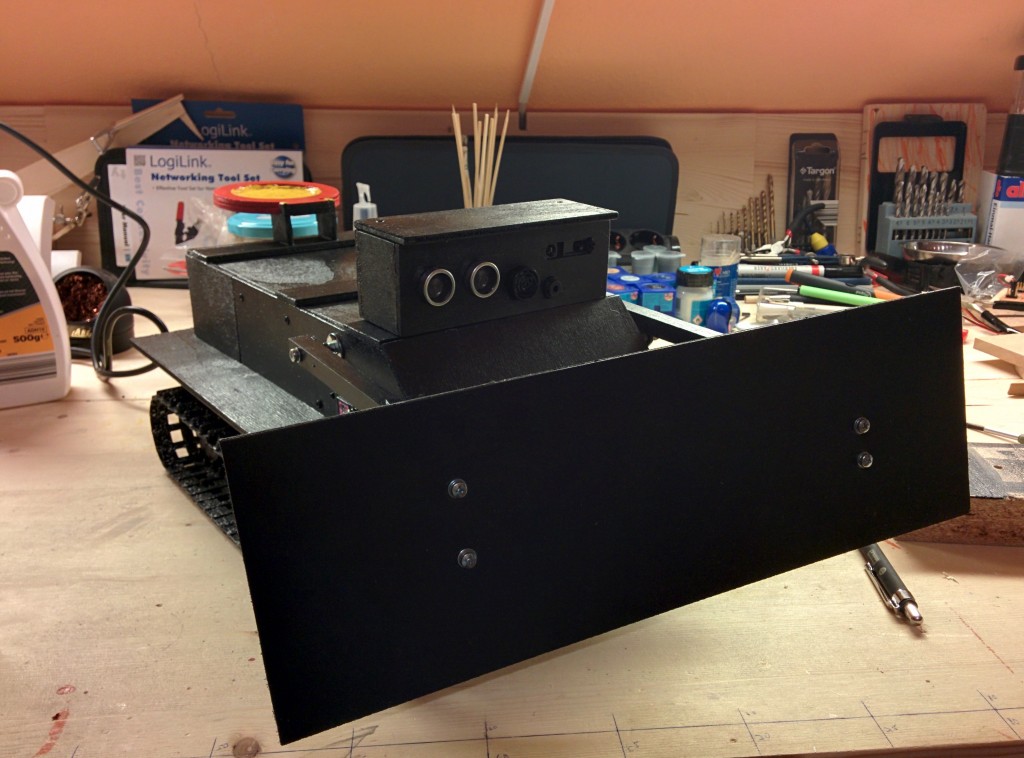
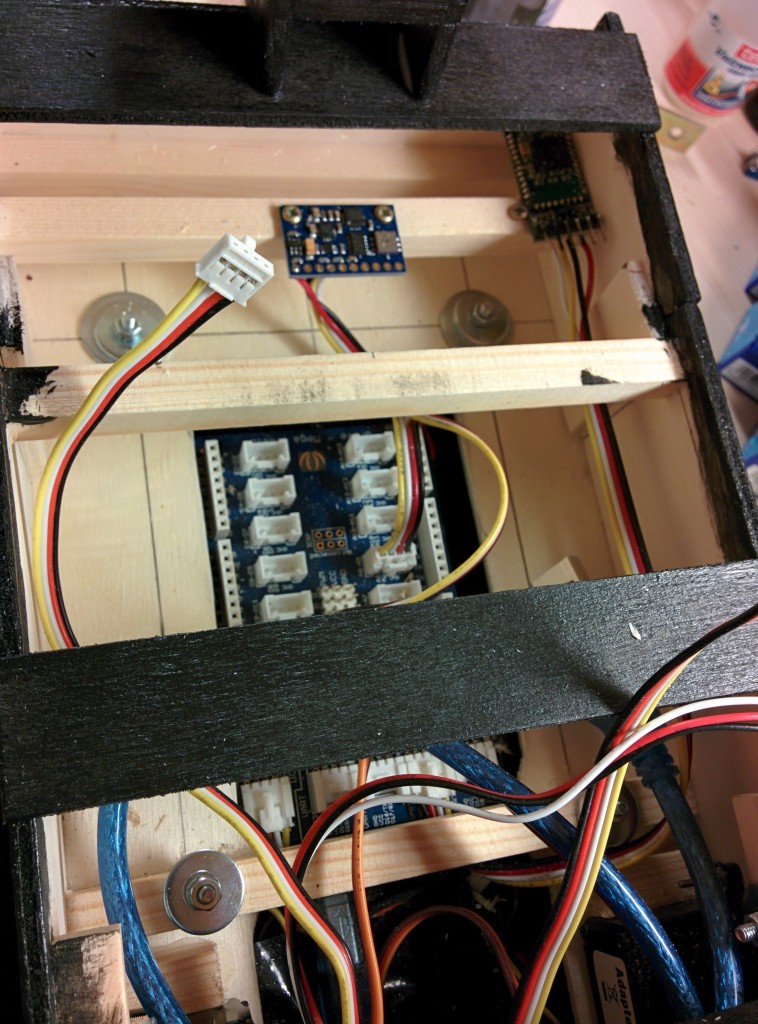
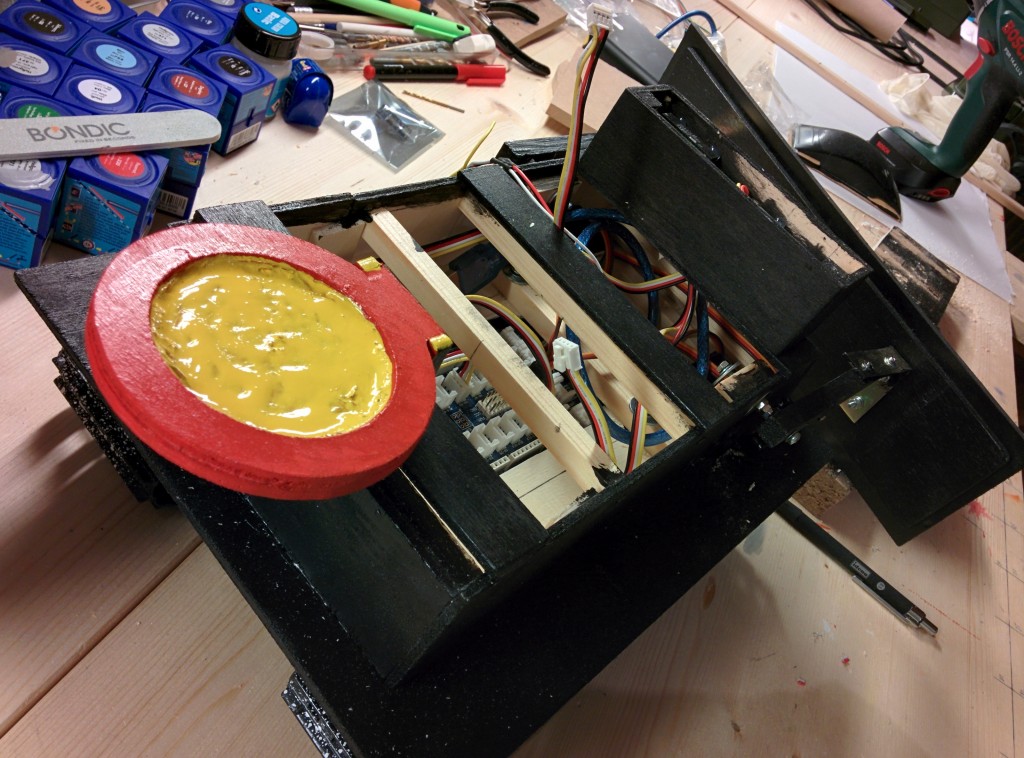

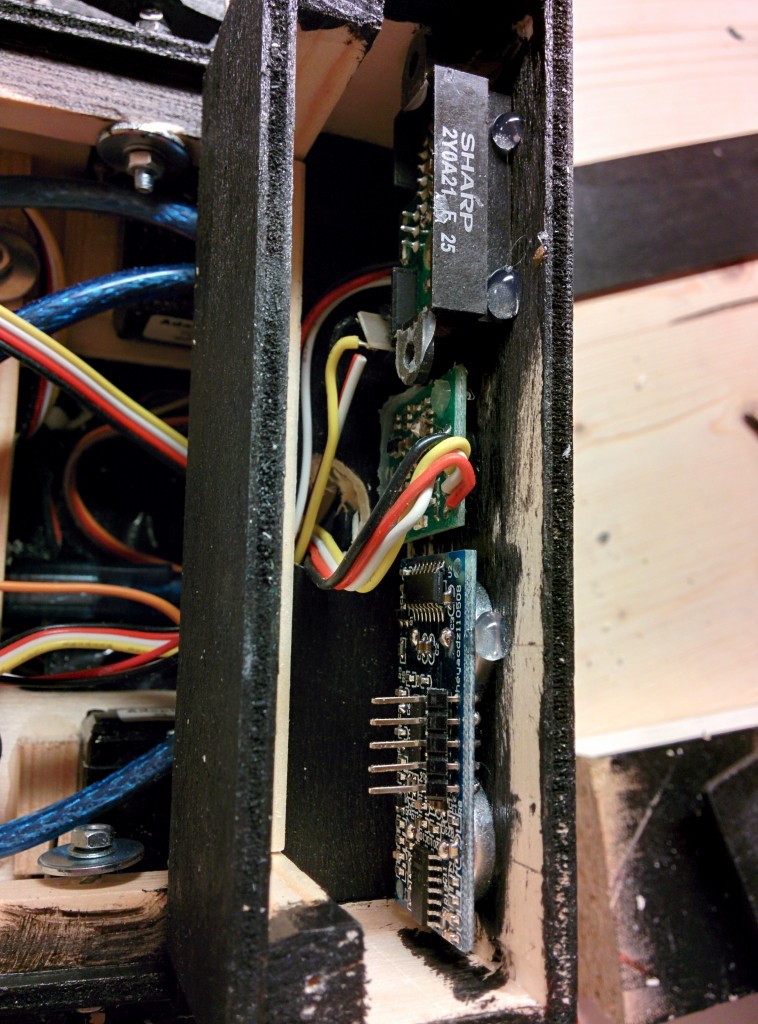
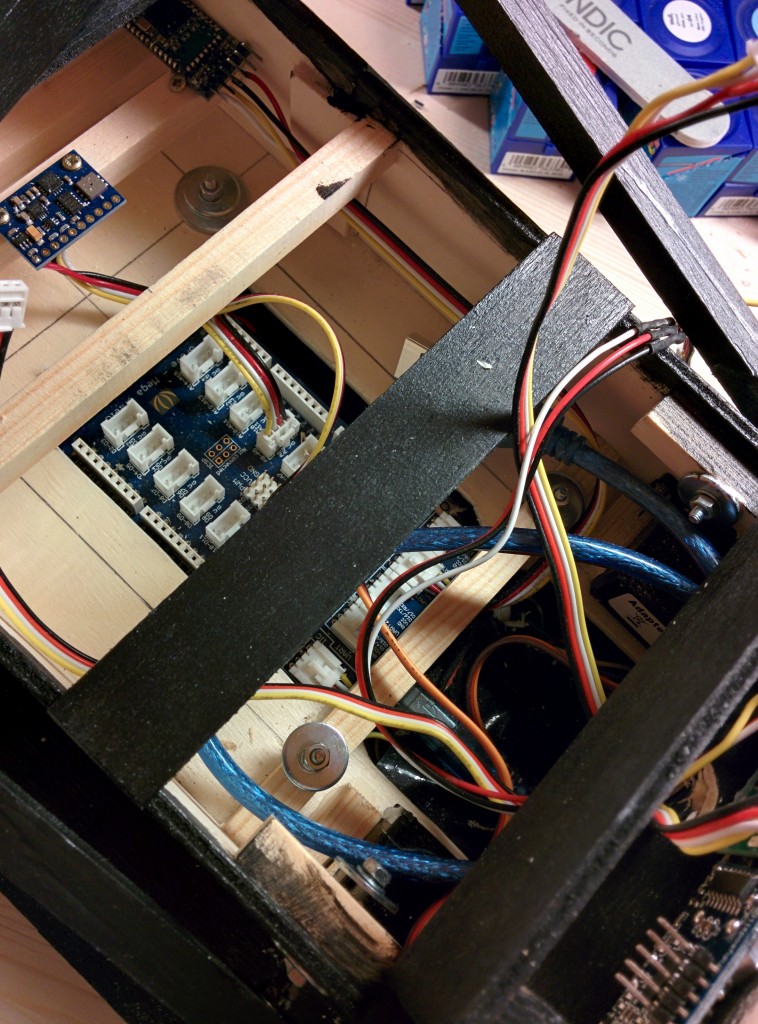
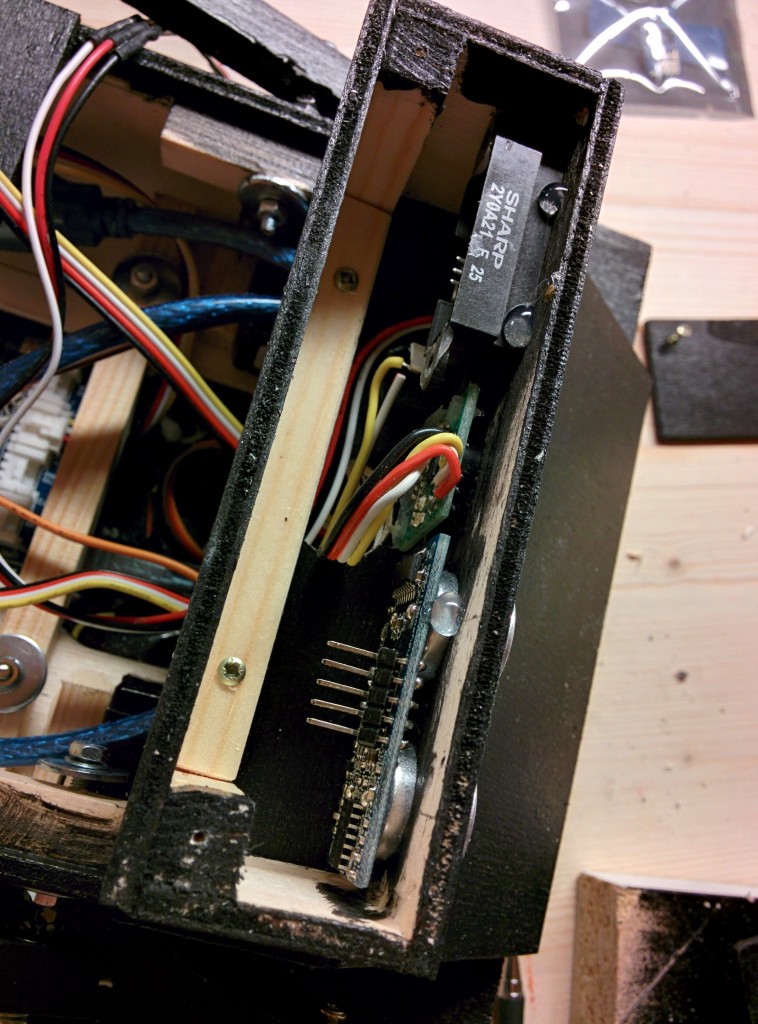

Im Fahrzeug werkelte also nun ein Arduino welcher über eine Motorsteuerung die Motoren des Fahrzeugs betrieb. Außerdem habe ich verschiedene Infrarot und Ultraschall Entfernungsmesser, einen Laser, zahlreiche multicolor LEDs und zwei Servomotoren für den Schneeschieber verbaut.
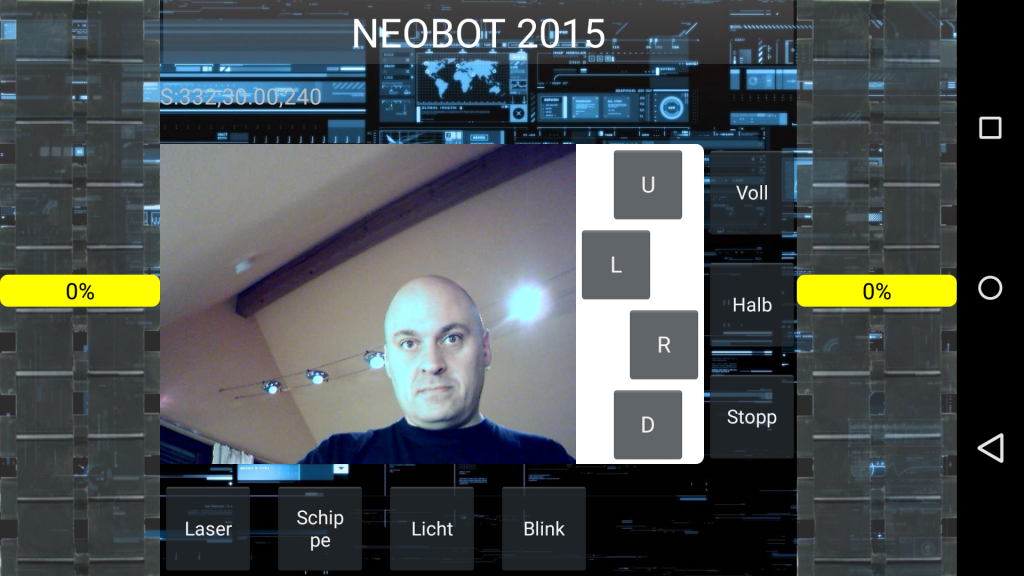
Steuern lässt sich das Gefährt bisher über eine Android Software welche ich geschrieben habe und die sowohl auf Tablets als auch auf meinem Handy läuft.
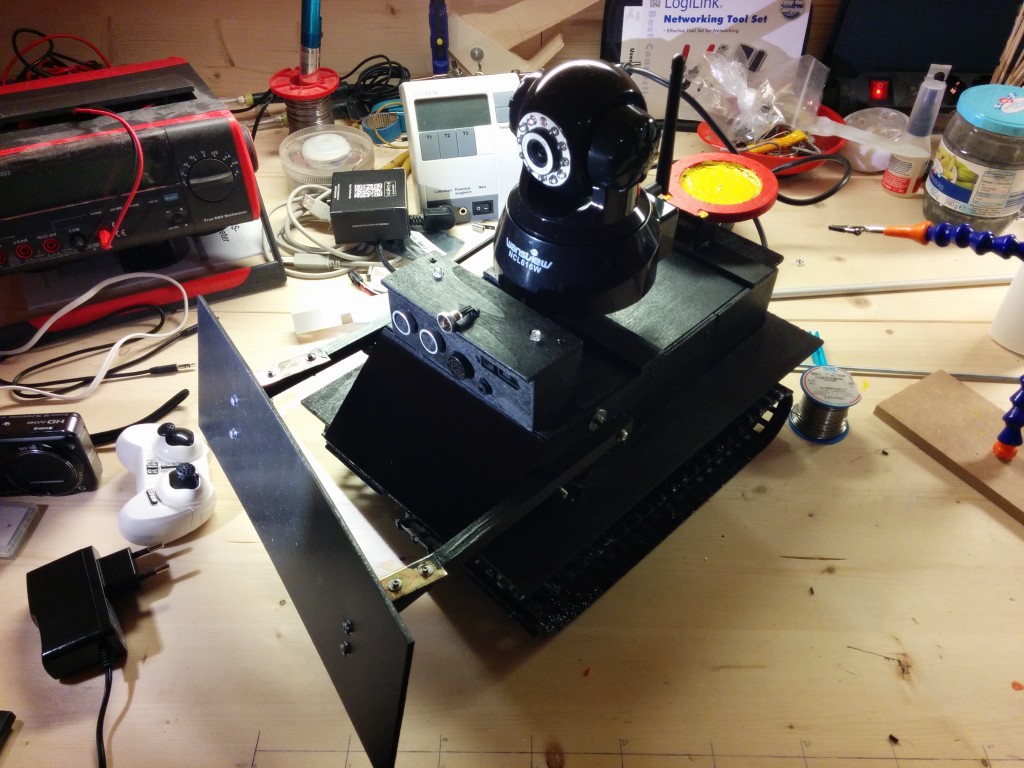
Damit ich auch noch ein bisschen Video habe, habe ich auf dem Teil auch noch eine steuerbare Kamera verbaut.
Das Gefährt, welches ich NeoBot2015 getauft habe, spannt nun ein eigenes WLan Netz auf und lässt sich mit der App darüber steuern. Es sendet einen Videostream, welcher von der App aufgefangen und angezeigt wird und die Kamera lässt sich sogar schwenken.

